1 Generating spatial sampling
You are reading the work-in-progress Spatial Sampling and Resampling for Machine Learning. This chapter is currently draft version, a peer-review publication is pending. You can find the polished first edition at https://opengeohub.github.io/spatial-sampling-ml/.
1.1 Spatial sampling
Sampling in statistics is done for the purpose of estimating population parameters and/or for testing of experiments. If Observations and Measurements (O&M) are collected in space i.e. as geographical variables this is referred to as spatial sampling and is often materialized as a point map with points representing locations of planned or implemented O&M. Preparing a spatial sampling plan is a type of design of experiment and hence it is important to do it right to avoid any potential bias.
Spatial sampling or producing and implementing sampling designs are common in various fields including physical geography, soil science, geology, vegetation science, ecology and similar. Imagine an area that potentially has problems with soil pollution by heavy metals. If we collect enough samples, we can overlay points vs covariate layers, then train spatial interpolation / spatial prediction models and produce predictions of the target variable. For example, to map soil pollution by heavy metals or soil organic carbon stock, we can collect soil samples on e.g. a few hundred predefined locations, then take the samples to the lab, measure individual values and then interpolate them to produce a map of concentrations. This is one of the most common methods of interest of geostatistics where e.g. various kriging methods are used to produce predictions of the target variable (see e.g. Bivand, Pebesma, & Rubio (2013)).
There are many sampling design algorithms that can be used to spatial sampling locations. In principle, all spatial sampling approaches can be grouped based on the following four aspects:
-
How objective is it? Here two groups exist:
Objective sampling designs which are either probability sampling or some experimental designs from spatial statistics;
Subjective or convenience sampling which means that the inclusion probabilities are unknown and are often based on convenience e.g. distance to roads / accessibility;
-
How much identically distributed is it? Here at least three groups exist:
Independent Identically Distributed (IID) sampling designs,
Clustered sampling i.e. non-equal probability sampling,
Censored sampling,
-
Is it based on geographical or feature space? Here at least three groups exist:
Geographical sampling i.e. taking into account only geographical dimensions + time;
Feature-space sampling i.e. taking into account only distribution of points in feature space;
Hybrid sampling i.e. taking both feature and geographical space into account;
-
How optimized is it? Here at least two groups exist:
Optimized sampling so that the target optimization criteria reaches minimum / maximum i.e. it can be proven as being optimized,
Unoptimized sampling, when either optimization criteria can not be tested or is unknown,
Doing sampling using objective sampling designs is important as it allows us to test hypotheses and produce unbiased estimation of population parameters or similar. Many spatial statisticians argue that only previously prepared, strictly followed randomized probability sampling can be used to provide an unbiased estimate of the accuracy of the spatial predictions (D. J. Brus, 2021). In the case of probability sampling, calculation of population parameters is derived mathematically i.e. that estimation process is unbiased and independent of the spatial properties of the target variable (e.g. spatial dependence structure and/or statistical distribution). For example, if we generate sampling locations using Simple Random Sampling (SRS), this sampling design has the following properties:
- It is an IID with each spatial location with exactly the same inclusion probability,
- It is symmetrical in geographical space meaning that about the same number of points can be found in each quadrant of the study area,
- It can be used to derive population parameters (e.g. mean) and these measures are per definition unbiased,
- Any random subset of the SRS is also a SRS,
SRS is in principle both objective sampling and IID sampling and can be easily generated provided some polygon map representing the study area. Two other somewhat more complex sampling algorithms with similar properties as SRS are for example different versions of tessellated sampling. The generalized random tessellation stratified (GRTS) design was for example used in the USA to produce sampling locations for the purpose of geochemical mapping; a multi-stage stratified random sampling design was used to produce LUCAS soil monitoring network of points.
Large point datasets representing observations and/or measurements in-situ can be used to generate maps by fitting regression and classification models using e.g. Machine Learning algorithms, then applying those models to predict values at all pixels. This is referred to as Predictive Mapping. In reality, many point datasets we use in Machine Learning for predictive mapping do not have ideal properties i.e. are neither IID nor are probabilities of inclusion known. Many are in fact purposive and/or convenience sampling and hence potentially over-represent some geographic features, are potentially censored and can lead to significant bias in estimation.
1.2 Response surface designs
If the objective of modeling is to build regression models (correlating the target variable with a number of spatial layers representing e.g. soil forming factors), then we are looking at the problem in statistics known as the response-surface experimental designs. Consider the following case of one target variable (\(Y\)) and one covariate variable (\(X\)). Assuming that the two are correlated linearly (i.e. \(Y = b_0 + b_1 \cdot X\)), one can easily prove that the optimal experimental design is to: (a) determine min and max of \(X\), then put half of the point at \(X_{min}\) and the other half at \(X_{max}\) (Hengl, Rossiter, & Stein, 2004). This design is called the D1 optimal design and indeed it looks relatively simple to implement. The problem is that it is the optimal design ONLY if the relationship between \(Y\) and \(X\) is perfectly linear. If the relationship is maybe close to quadratic than the D1 design is much worse than for example the D2 design (Hengl, Rossiter, & Stein, 2004).
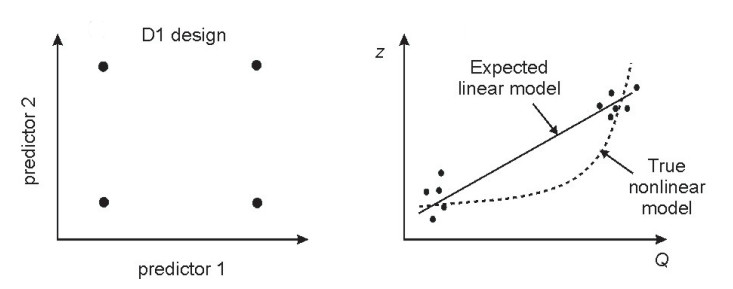
Figure 1.1: Example of D1 design: (left) D1 design in 2D feature space, (right) D1 design is optimal only for linear model, if the model is curvilinear, it is in fact the worse design than simple random sampling.
In practice we may not know what is the nature of the relationship between \(Y\) and \(X\), i.e. we do not wish to take a risk and produce biased estimation. Hence we can assume that it could be a curvilinear relationship and so we need to sample uniformly in the feature space.
1.3 Spatial sampling algorithms of interest
This chapter reviews some common approaches for preparing point samples for a study area that you are visiting for the first time and/or no previous samples or models are available. We focus on the following spatial sampling methods:
- Subjective or convenience sampling,
- Simple Random Sampling (SRS) (Bivand, Pebesma, & Rubio, 2013; D. J. Brus, 2021),
- Latin Hypercube Sampling (LHS) and its variants e.g. Conditioned LHS (Malone, Minansy, & Brungard, 2019; Minasny & McBratney, 2006),
- Feature Space Coverage Sampling (FSCS) (Goerg, 2013) and fuzzy k-means clustering (Hastie, Tibshirani, & Friedman, 2009),
- 2nd round sampling (Stumpf et al., 2017),
Our interest in this tutorials is in producing predictions (maps) of the target variable by employing regression / correlation between the target variable and multitude of features (raster layers), and where various Machine Learning techniques are used for training and prediction.
Once we collect enough training points in an area we can overlay points and GIS layers to produce a regression matrix or classification matrix, and which can then be used to generate spatial predictions i.e. produce maps. As a state-of-the-art we use the mlr framework for Ensemble Machine Learning as the key Machine Learning framework for predictive mapping. For an introduction to Ensemble Machine Learning for Predictive Mapping please refer to this tutorial.
1.4 Ebergotzen dataset
To test various sampling and mapping algorithms, we can use the Ebergotzen dataset available also via the plotKML package (Hengl, Roudier, Beaudette, & Pebesma, 2015):
set.seed(100)
library(plotKML)
library(sp)
library(viridis)
#> Loading required package: viridisLite
library(raster)
library(ggplot2)
library(dplyr)
#>
#> Attaching package: 'dplyr'
#> The following object is masked from 'package:matrixStats':
#>
#> count
#> The following object is masked from 'package:xgboost':
#>
#> slice
#> The following object is masked from 'package:nlme':
#>
#> collapse
#> The following objects are masked from 'package:raster':
#>
#> intersect, select, union
#> The following objects are masked from 'package:stats':
#>
#> filter, lag
#> The following objects are masked from 'package:base':
#>
#> intersect, setdiff, setequal, union
library(tidyr)
#>
#> Attaching package: 'tidyr'
#> The following objects are masked from 'package:Matrix':
#>
#> expand, pack, unpack
#> The following object is masked from 'package:raster':
#>
#> extract
data("eberg_grid25")
gridded(eberg_grid25) <- ~x+y
proj4string(eberg_grid25) <- CRS("+init=epsg:31467")This dataset is described in detail in Böhner, Blaschke, & Montanarella (2008). It is a soil survey dataset with ground observations and measurements of soil properties including soil types. The study area is a perfect square 10×10 km in size.
We have previously derived number of additional DEM parameters directly using SAGA GIS (Conrad et al., 2015) and which we can add to the list of covariates:
eberg_grid25 = cbind(eberg_grid25, readRDS("./extdata/eberg_dtm_25m.rds"))
names(eberg_grid25)
#> [1] "DEMTOPx" "HBTSOLx" "TWITOPx" "NVILANx"
#> [5] "eberg_dscurv" "eberg_hshade" "eberg_lsfactor" "eberg_pcurv"
#> [9] "eberg_slope" "eberg_stwi" "eberg_twi" "eberg_vdepth"
#> [13] "PMTZONES"so a total of 11 layers at 25-m spatial resolution, from which two layers
(HBTSOLx and PMTZONES) are factors representing soil units and parent material
units. Next, for further analysis, and to reduce data overlap, we can convert all
primary variables to (numeric) principal components using:
eberg_spc = landmap::spc(eberg_grid25[-c(2,3)])
#> Converting PMTZONES to indicators...
#> Converting covariates to principal components...which gives the a total of 14 PCs. The patterns in the PC components reflect
a complex combination of terrain variables, lithological discontinuities (PMTZONES)
and surface vegetation (NVILANx):
#spplot(eberg_spc@predicted[1:3], col.regions=SAGA_pal[[1]])
eberg_spc_pred <- stack(eberg_spc@predicted[1:3]) %>%
as.data.frame(xy=T) %>%
gather(key=PCA, value = value, -x, -y)
ggplot() +
geom_raster(data = eberg_spc_pred , aes(x = x, y = y, fill = value)) +
scale_fill_gradientn(colours =SAGA_pal[[1]], name="") +
facet_wrap(PCA~.)+
coord_quickmap()+
ggtitle("PCA components Ebergotzen") +
theme_void()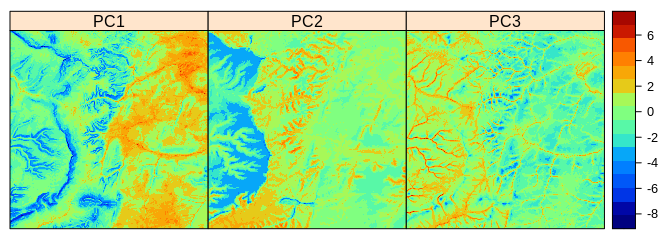
Figure 1.2: Principal Components derived using Ebergotzen dataset.
1.5 Simple Random Sampling
To generate a SRS with e.g. 100 points we can use the sp package spsample method:
rnd <- spsample(eberg_grid25[1], type="random", n=100)
# plot(raster(eberg_spc@predicted[1]), col=SAGA_pal[[1]])
# points(rnd, pch="+")
eberg_spc_pred <- raster(eberg_spc@predicted[1]) %>%
as.data.frame(xy=T)
rnd_pred <- as.data.frame(rnd,xy=T)
ggplot() +
geom_raster(data = eberg_spc_pred , aes(x = x, y = y, fill = PC1)) +
geom_point(data = rnd_pred, aes(x=x,y=y), shape="+", size=4)+
scale_fill_gradientn(colours =SAGA_pal[[1]], name="") +
coord_quickmap()+
ggtitle("An example of a Simple Random Sample (SRS)") +
theme_minimal()+ xlab("Westing")+ ylab("Northing")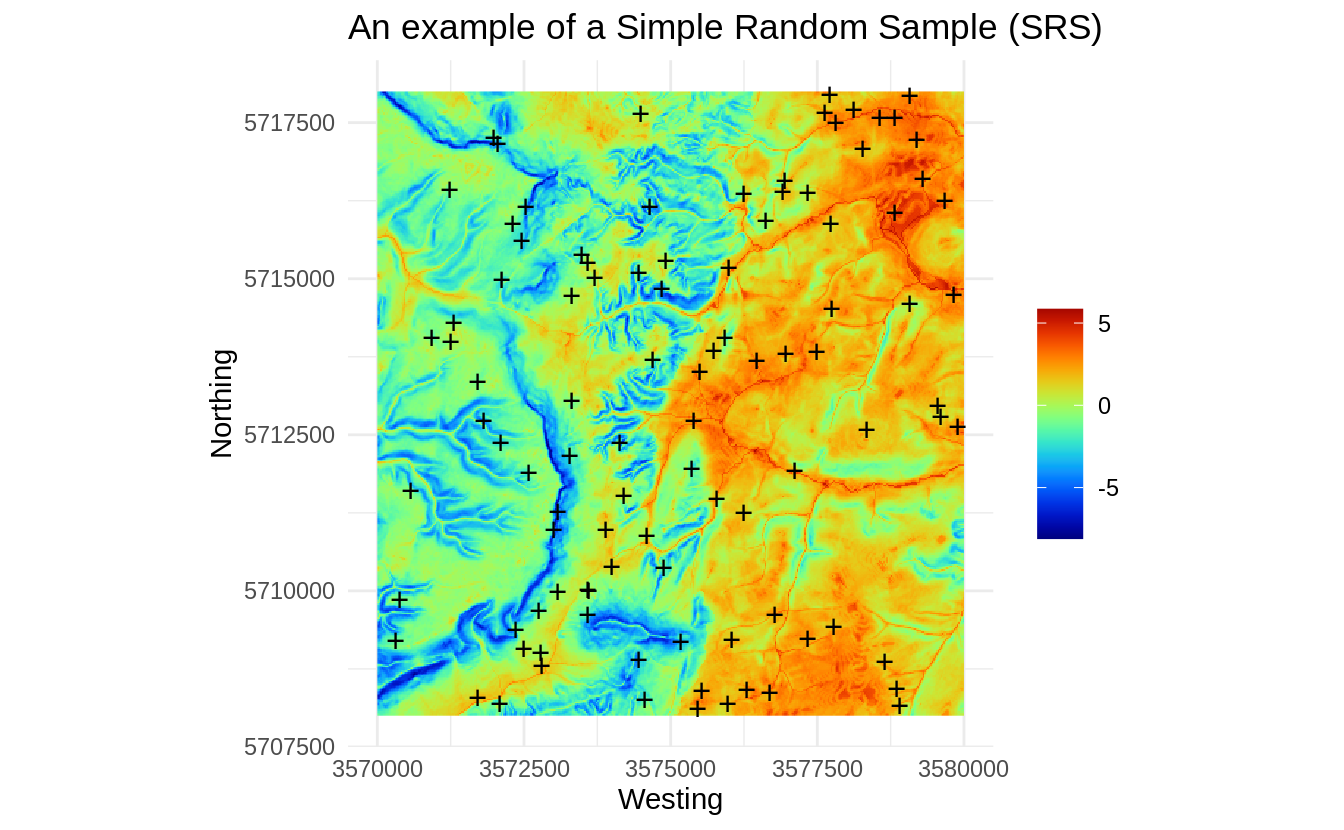
Figure 1.3: An example of a Simple Random Sample (SRS).
This sample is generated purely based on the spatial domain, the feature space is completely ignored / not taken into account, hence we can check how well do these points represent the feature space using a density plot:
ov.rnd = sp::over(rnd, eberg_spc@predicted[,1:2])
library(hexbin)
library(grid)
reds = colorRampPalette(RColorBrewer::brewer.pal(9, "YlOrRd")[-1])
hb <- hexbin(eberg_spc@predicted@data[,1:2], xbins=60)
p <- plot(hb, colramp = reds, main='PCA Ebergotzen SRS')
pushHexport(p$plot.vp)
grid.points(ov.rnd[,1], ov.rnd[,2], pch="+")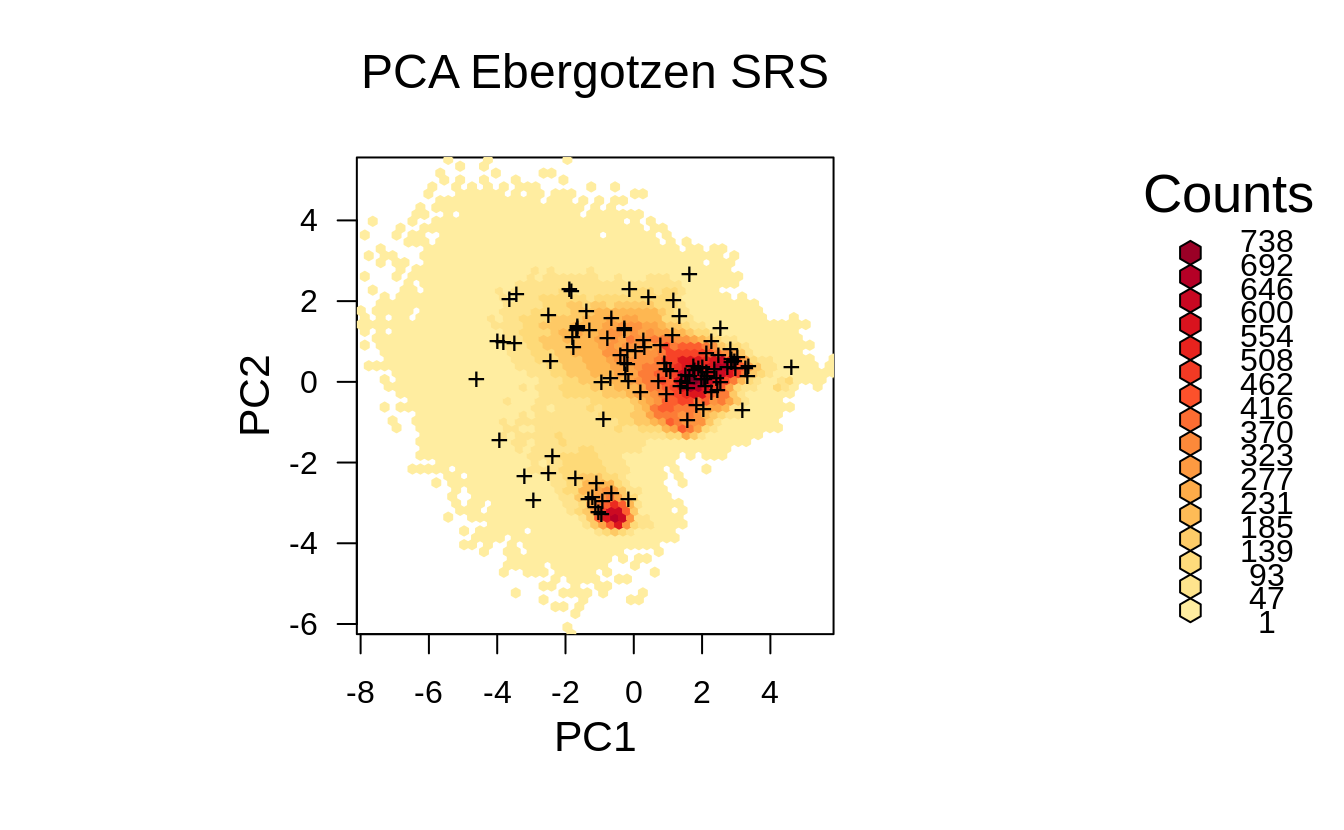
Figure 1.4: Distribution of the SRS points from the previous example in the feature space.
Visually, we do not directly see from Fig. 1.4 that the generated SRS maybe misses some important feature space, however if we zoom in, then we can notice that some parts of feature space (in this specific randomization) with high density are somewhat under-represented. Imagine if we reduce number of sampling points then we run even higher risk of missing some areas in the feature space by using SRS.
Next, we are interested in evaluating the occurrence probability of the SRS points based on the PCA components. To derive the occurrence probability we can use the maxlike package method (Royle, Chandler, Yackulic, & Nichols, 2012):
fm.cov <- stats::as.formula(paste("~", paste(names(eberg_spc@predicted[1:4]), collapse="+")))
ml <- maxlike::maxlike(formula=fm.cov, rasters=raster::stack(eberg_spc@predicted[1:4]),
points=rnd@coords, method="BFGS", removeDuplicates=TRUE, savedata=TRUE)
ml.prob <- predict(ml)
# plot(ml.prob)
# points(rnd@coords, pch="+")
ml.prob_gg <- ml.prob %>% as.data.frame(xy=TRUE)
ggplot() +
geom_raster(data = ml.prob_gg , aes(x = x, y = y, fill = layer)) +
geom_point(data = rnd_pred, aes(x=x,y=y), shape="+", size=4)+
scale_fill_gradientn(colours =terrain.colors(10), name="") +
coord_quickmap()+
ggtitle("An example of a Simple Random Sample (SRS)") +
theme_minimal()+ xlab("Westing")+ ylab("Northing")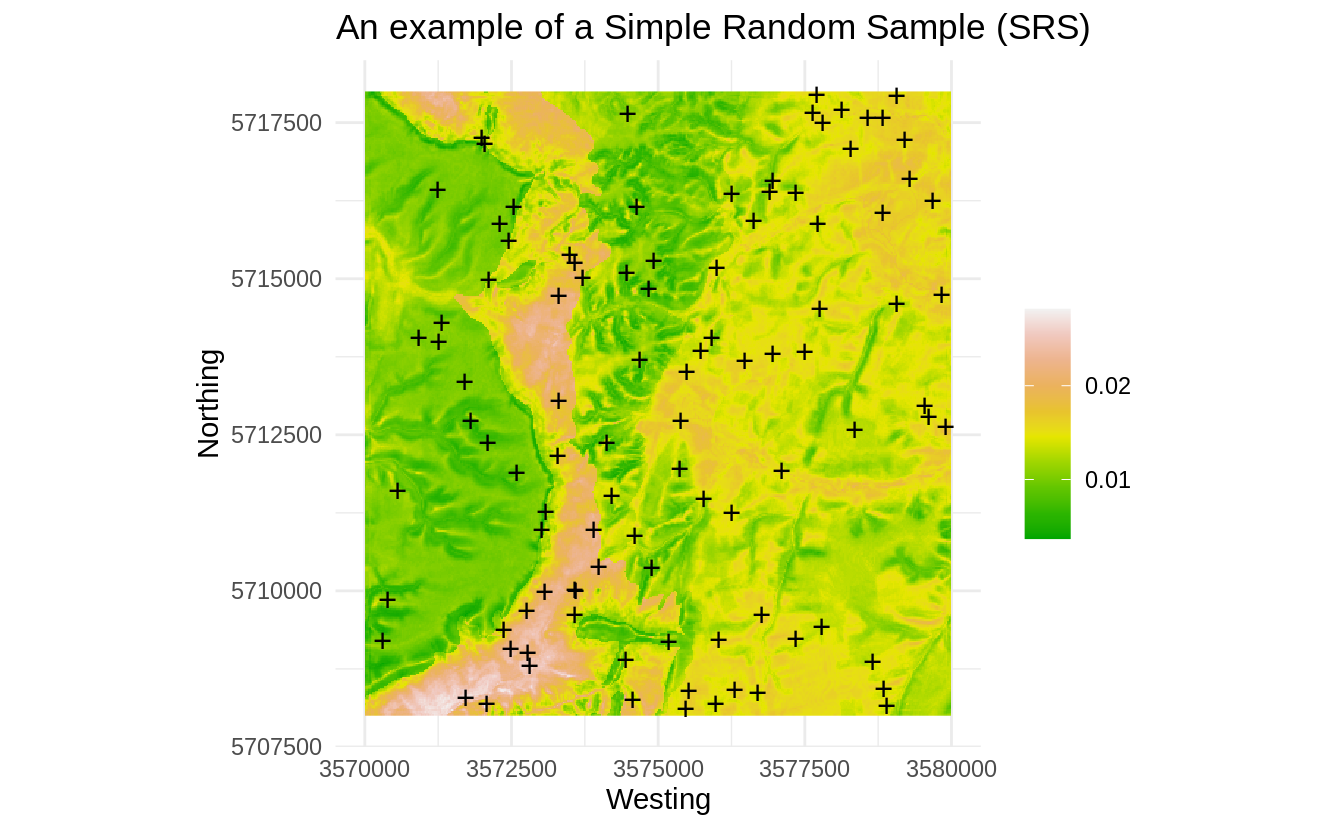
Figure 1.5: Occurrence probability for SRS derived using the maxlike package.
Note: for the sake of reducing the computing intensity we focus on the first four PCs. In practice, feature space analysis can be quite computational and we recommend using parallelized versions within an High Performance Computing environments to run such analysis.
Fig. 1.5 shows that, by accident, some parts of the feature space might be somewhat under-represented (areas with low probability of occurrence on the map). Note however that occurrence probability for this dataset is overall very low (<0.05), indicating that distribution of points is not much correlated with the features. This specific SRS is thus probably satisfactory also for feature space analysis: the SRS points do not seem to group (which would in this case be by accident) and hence maxlike gives very low probability of occurrence.
We can repeat SRS many times and then see if the clustering of points gets more problematic, but as you can image, in practice for large number of samples it is a good chance that all features would get well represented also in the feature space even though we did not include feature space variables in the production of the sampling plan.
We can now also load the actual points collected for the Ebergotzen case study:
data(eberg)
eberg.xy <- eberg[,c("X","Y")]
coordinates(eberg.xy) <- ~X+Y
proj4string(eberg.xy) <- CRS("+init=epsg:31467")
ov.xy = sp::over(eberg.xy, eberg_grid25[1])
eberg.xy = eberg.xy[!is.na(ov.xy$DEMTOPx),]
sel <- sample.int(length(eberg.xy), 100)
eberg.smp = eberg.xy[sel,]To quickly estimate spread of points in geographical and feature spaces, we can
also use the function spsample.prob that calls both the kernel density function
from the spatstat package, and derives the probability of occurrence using the
maxlike package:
iprob <- landmap::spsample.prob(eberg.smp, eberg_spc@predicted[1:4])
#> Deriving kernel density map using sigma 1010 ...
#> Deriving inclusion probabilities using MaxLike analysis...In this specific case, the actual sampling points are much more clustered, so if we plot the two occurrence probability maps derived using maxlike next to each other (actual vs SRS) we get:
# op <- par(mfrow=c(1,2))
# plot(raster(iprob$maxlike), zlim=c(0,1))
# points(eberg.smp@coords, pch="+")
# plot(ml.prob, zlim=c(0,1))
# points(rnd@coords, pch="+")
# par(op)
occ_prob <- stack(raster(iprob$maxlike),ml.prob)
names(occ_prob) <- c("maxlike","ml.prob")
occ_prob <- occ_prob %>%
as.data.frame(xy=T) %>% gather(key=layer, value = value, -x, -y)
ggplot() +
geom_raster(data = occ_prob , aes(x = x, y = y, fill = value)) +
geom_point(data = rnd_pred, aes(x=x,y=y), shape="+", size=4)+
scale_fill_gradientn(colours =terrain.colors(5), name="") +
facet_wrap(layer~.)+
coord_quickmap()+
ggtitle("Comparison occurrence probability") +
theme_minimal()+ xlab("Westing")+ ylab("Northing")+
theme(panel.spacing = unit(2, "lines"))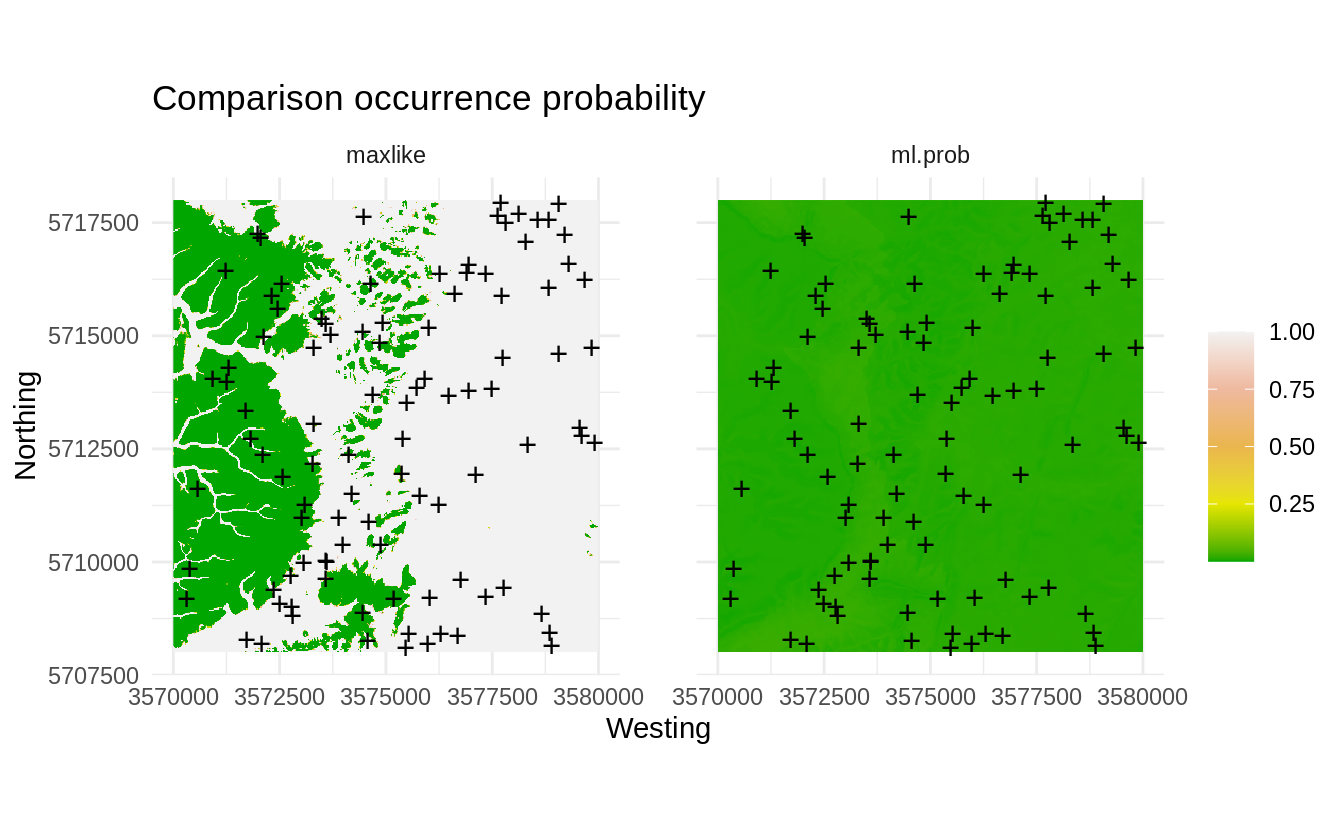
Figure 1.6: Comparison occurrence probability for actual and SRS samples derived using the maxlike package.
The map on the left clearly indicates that most of the sampling points are basically preferentially located in the plain area, while the hillands are systematically under-sampled. This we can also cross-check by reading the description of the dataset in Böhner, Blaschke, & Montanarella (2008):
- the Ebergotzen soil survey points focus on agricultural land only,
- no objective sampling design has been used, hence some points are clustered,
This is also clearly visible from the feature map plot where one part of the feature space seem to be completely omitted from sampling:
ov2.rnd = sp::over(eberg.smp, eberg_spc@predicted[,1:2])
p <- plot(hb, colramp = reds, main='PCA Ebergotzen actual')
pushHexport(p$plot.vp)
grid.points(ov2.rnd[,1], ov2.rnd[,2], pch="+")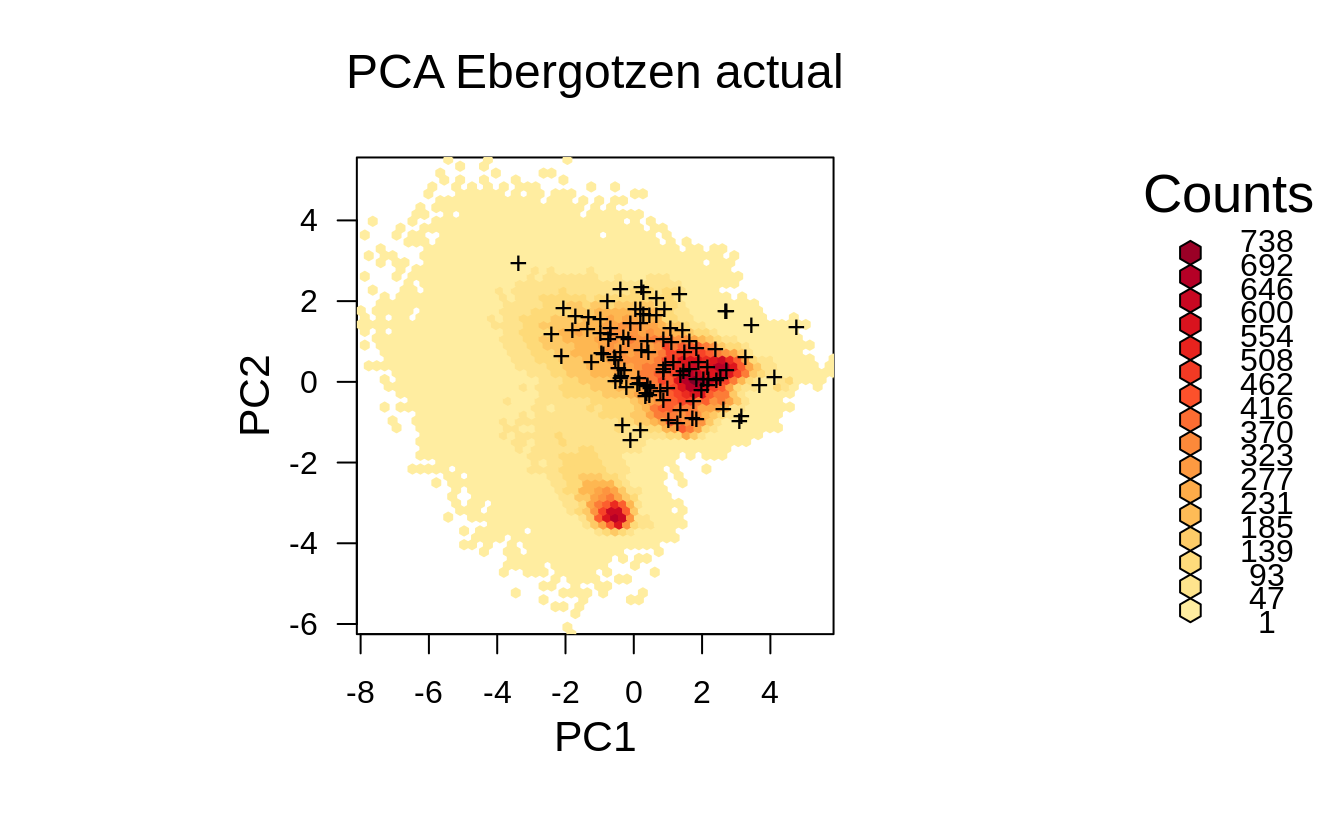
Figure 1.7: Distribution of the actual survey points from the previous example displayed in the feature space.
1.6 Latin Hypercube Sampling
In the previous example we have shown how to implement SRS and then also evaluate it
against feature layers. Often SRS represent very well feature space so it can be
directly used for Machine Learning and with a guarantee of not making too much bias
in predictions. To avoid, however, risk of missing out some parts of the feature space,
and also to try to optimize allocation of points, we can generate a sample using the
Latin Hypercube Sampling (LHS) method. In a nutshell, LHS methods are based on
dividing the Cumulative Density Function (CDF) into n equal partitions, and
then choosing a random data point in each partition, consequently:
- CDF of LHS samples matches the CDF of population (hence unbiased representation),
- Extrapolation in the feature space should be minimized,
Latin Hypercube and sampling optimization using LHS is explained in detail in Minasny & McBratney (2006) and Shields & Zhang (2016). For Dick J. Brus (2015), LHS is just a special case of balanced sampling i.e. sampling based on allocation in feature space. The lhs package also contains numerous examples of how to implement LHS for (non-spatial) data.
Here we use an implementation of the LHS available in the clhs package (P. Roudier, 2021):
This actually implements the so-called “Conditional LHS” (Minasny & McBratney, 2006), and can get quite computational for large stack of rasters, hence we manually limit the number of iterations to 100.
We can plot the LHS sampling plan:
# plot(raster(eberg_spc@predicted[1]), col=SAGA_pal[[1]])
# points(rnd.lhs@coords, pch="+")
eberg_spc_pred <- raster(eberg_spc@predicted[1]) %>% as.data.frame(xy=TRUE)
rnd.lhs_coords <- data.frame(rnd.lhs@coords)
ggplot() +
geom_raster(data = eberg_spc_pred, aes(x = x, y = y, fill = PC1)) +
geom_point(data = rnd.lhs_coords, aes(x=x,y=y), shape="+", size=4)+
scale_fill_gradientn(colours =SAGA_pal[[1]], name="") +
coord_quickmap() +
ggtitle("An example of a Latin Hypercube Sample (LHS)") +
theme_minimal() + xlab("Westing")+ ylab("Northing")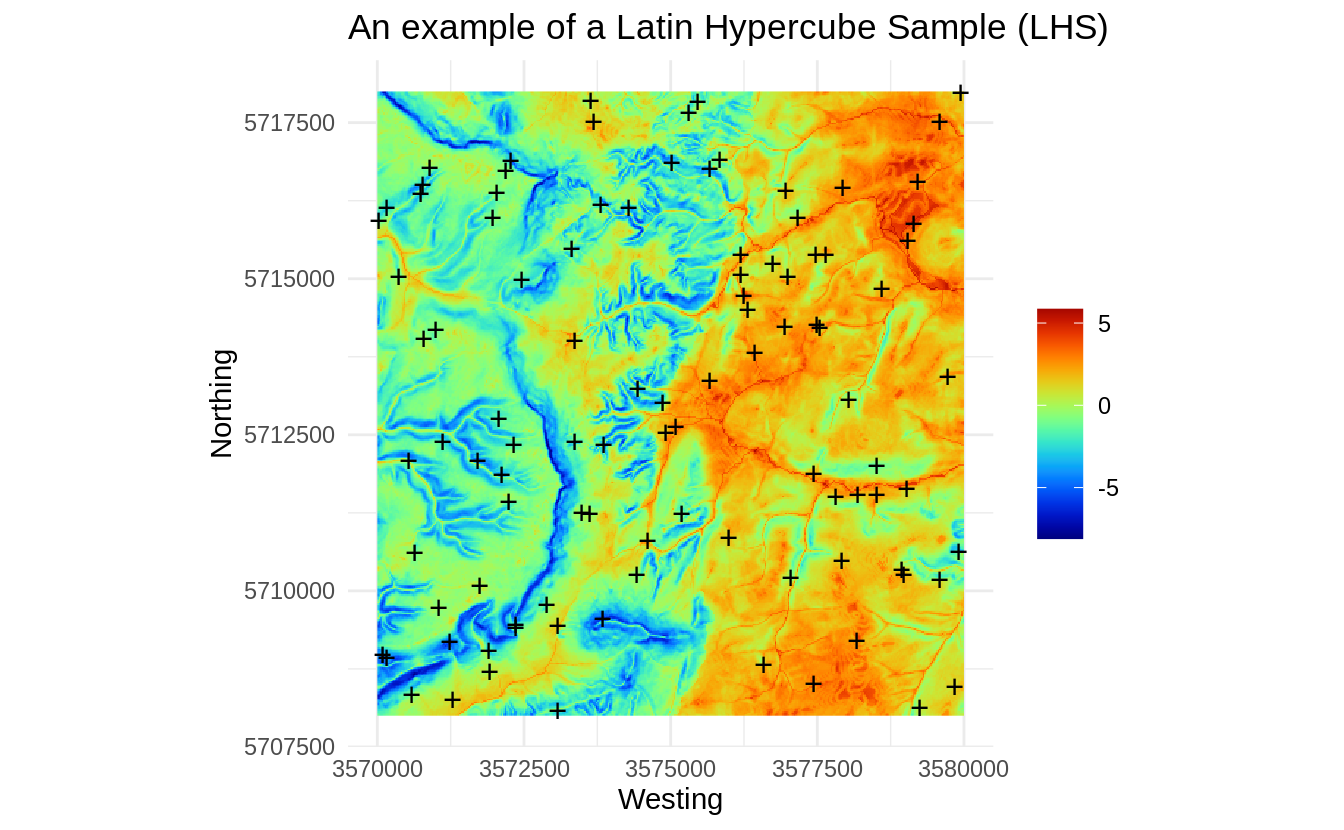
Figure 1.8: An example of a Latin Hypercube Sample (LHS).
p <- plot(hb, colramp = reds, main='PCA Ebergotzen LHS')
pushHexport(p$plot.vp)
grid.points(rnd.lhs$PC1, rnd.lhs$PC2, pch="+")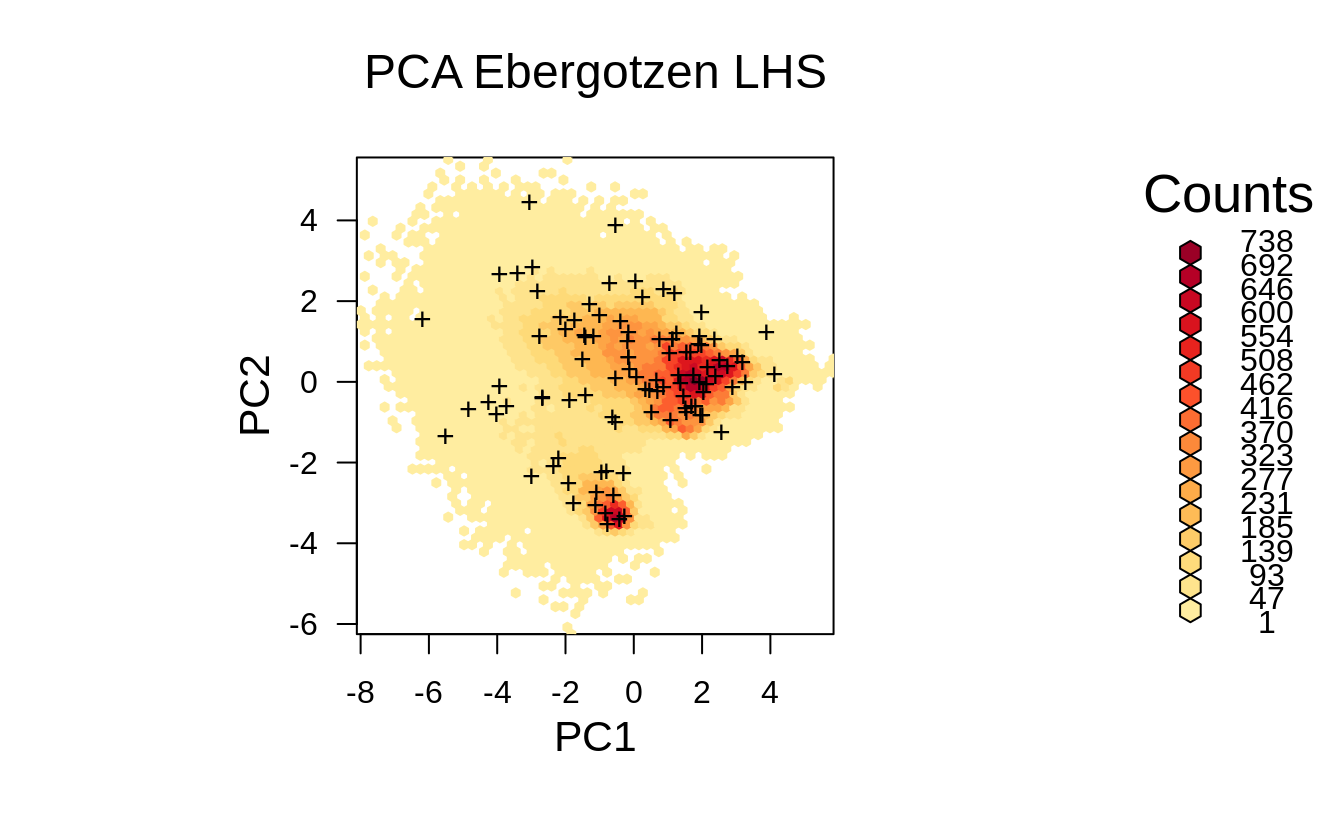
Figure 1.9: Distribution of the LHS points from the previous example displayed in the feature space.
Although in principle we might not see any difference in the point pattern between SRS and LHS, the feature space plot clearly shows that LHS covers systematically feature space map, i.e. we would have a relatively low risk of missing out some important features as compared to Fig. 1.7.
Thus the main advantages of the LHS are:
- it ensures that feature space is represented systematically i.e. it is optimized
for Machine Learning using the specific feature layers;
- it is an Independent Identically Distributed (IID) sampling design;
- thanks to the clhs package, also the survey costs raster layer can be integrated to still keep systematic spread, but reduce survey costs as much as possible (Pierre Roudier, Beaudette, & Hewitt, 2012);
1.7 Feature Space Coverage Sampling
The Feature Space Coverage Sampling (FSCS) is described in detail in D. J. Brus (2019). In a nutshell, FSCS aims at optimal coverage of the feature space which is achieved by minimizing the average distance of the population units (raster cells) to the nearest sampling units in the feature space represented by the raster layers (Ma, Brus, Zhu, Zhang, & Scholten, 2020).
To produce FSCS point sample we can use function kmeanspp of package LICORS (Goerg, 2013).
First we partition the feature space cube to e.g. 100 clusters. We then select raster cells
with the shortest scaled Euclidean distance in covariate-space to the centers of
the clusters as the sampling units:
library(LICORS)
library(fields)
fscs.clust <- kmeanspp(eberg_spc@predicted@data[,1:4], k=100, iter.max=100)
D <- fields::rdist(x1 = fscs.clust$centers, x2 = eberg_spc@predicted@data[,1:4])
units <- apply(D, MARGIN = 1, FUN = which.min)
rnd.fscs <- eberg_spc@predicted@coords[units,]Note: the k-means++ algorithm is of most interest for small sample sizes: “for large
sample sizes the extra time needed for computing the initial centers can become
substantial and may not outweigh the larger number of starts that can be afforded
with the usual k-means algorithm for the same computing time” (D. J. Brus, 2021).
The kmeanspp algorithm from the LICORS package is unfortunately quite computational
and is in principle not recommended for large grids / to generate large number of
samples. Instead, we recommend clustering feature space using the h2o.kmeans function
from the h2o
package,
which is also suitable for larger datasets with computing running in parallel:
library(h2o)
h2o.init(nthreads = -1)
#>
#> H2O is not running yet, starting it now...
#>
#> Note: In case of errors look at the following log files:
#> /tmp/RtmpUZO4zW/file5442ca5b7dd/h2o_tomislav_started_from_r.out
#> /tmp/RtmpUZO4zW/file544524f047/h2o_tomislav_started_from_r.err
#>
#>
#> Starting H2O JVM and connecting: .. Connection successful!
#>
#> R is connected to the H2O cluster:
#> H2O cluster uptime: 2 seconds 96 milliseconds
#> H2O cluster timezone: Europe/Amsterdam
#> H2O data parsing timezone: UTC
#> H2O cluster version: 3.30.0.1
#> H2O cluster version age: 1 year, 9 months and 24 days !!!
#> H2O cluster name: H2O_started_from_R_tomislav_vru837
#> H2O cluster total nodes: 1
#> H2O cluster total memory: 15.71 GB
#> H2O cluster total cores: 32
#> H2O cluster allowed cores: 32
#> H2O cluster healthy: TRUE
#> H2O Connection ip: localhost
#> H2O Connection port: 54321
#> H2O Connection proxy: NA
#> H2O Internal Security: FALSE
#> H2O API Extensions: Amazon S3, XGBoost, Algos, AutoML, Core V3, TargetEncoder, Core V4
#> R Version: R version 4.0.2 (2020-06-22)
#> Warning in h2o.clusterInfo():
#> Your H2O cluster version is too old (1 year, 9 months and 24 days)!
#> Please download and install the latest version from http://h2o.ai/download/
df.hex <- as.h2o(eberg_spc@predicted@data[,1:4], destination_frame = "df")
#>
|
| | 0%
|
|======================================================================| 100%
km.nut <- h2o.kmeans(training_frame=df.hex, k=100, keep_cross_validation_predictions = TRUE)
#>
|
| | 0%
|
|============== | 20%
|
|======================================================================| 100%
#km.nutNote: in the example above, we have manually set the number of clusters to 100, but the number of clusters could be also derived using some optimization procedure. Next, we predict the clusters and plot the output:
m.km <- as.data.frame(h2o.predict(km.nut, df.hex, na.action=na.pass))
#>
|
| | 0%
|
|======================================================================| 100%We can save the class centers (if needed for any further analysis):
class_df.c = as.data.frame(h2o.centers(km.nut))
names(class_df.c) = names(eberg_spc@predicted@data[,1:4])
str(class_df.c)
#> 'data.frame': 100 obs. of 4 variables:
#> $ PC1: num 0.0276 -2.3565 -4.1214 -0.2878 0.6763 ...
#> $ PC2: num 2.51 -4.38 0.93 -3.24 2.08 ...
#> $ PC3: num 2.65 -3.1 -1.15 1.55 1.74 ...
#> $ PC4: num 2.87 -2.536 -1.781 0.156 -2.74 ...
#write.csv(class_df.c, "NCluster_100_class_centers.csv")To select sampling points we use the minimum distance to class centers (D. J. Brus, 2021):
D <- fields::rdist(x1 = class_df.c, x2 = eberg_spc@predicted@data[,1:4])
units <- apply(D, MARGIN = 1, FUN = which.min)
rnd.fscs <- eberg_spc@predicted@coords[units,]
# plot(raster(eberg_spc@predicted[1]), col=SAGA_pal[[1]])
# points(rnd.fscs, pch="+")
eberg_spc_pred <- raster(eberg_spc@predicted[1]) %>% as.data.frame(xy=T)
rnd.fscs <- as.data.frame(rnd.fscs)
ggplot() +
geom_raster(data = eberg_spc_pred , aes(x = x, y = y, fill = PC1)) +
geom_point(data = rnd.fscs, aes(x=x,y=y), shape="+", size=4)+
scale_fill_gradientn(colours =SAGA_pal[[1]], name="") +
coord_quickmap()+
ggtitle("An example of a Feature Space Coverage Sampling (FSCS)") +
theme_minimal()+ xlab("Westing")+ ylab("Northing")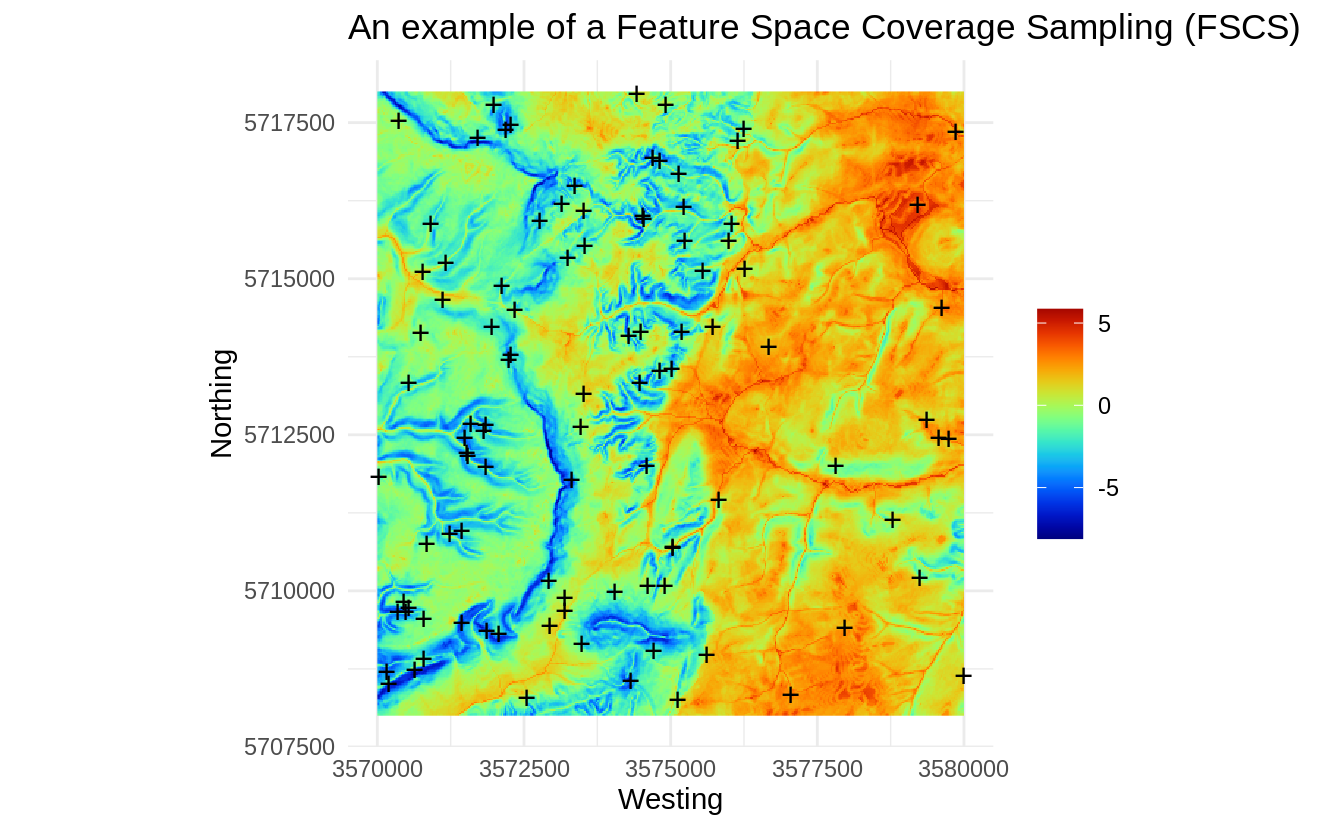
Figure 1.10: An example of a Feature Space Coverage Sampling (FSCS).
Visually, FSCS seem to add higher spatial density of points in areas where there
is higher complexity. The h2o.kmeans algorithm stratifies area into most
possible homogeneous units (in the example above, large plains in the right
part of the study area are relatively homogeneous, hence the sampling intensity
in there areas drops significantly when visualized in the geographical space),
and the points are then allocated per each strata.
p <- plot(hb, colramp = reds, main='PCA Ebergotzen FSCS')
pushHexport(p$plot.vp)
grid.points(eberg_spc@predicted@data[units,"PC1"], eberg_spc@predicted@data[units,"PC2"], pch="+")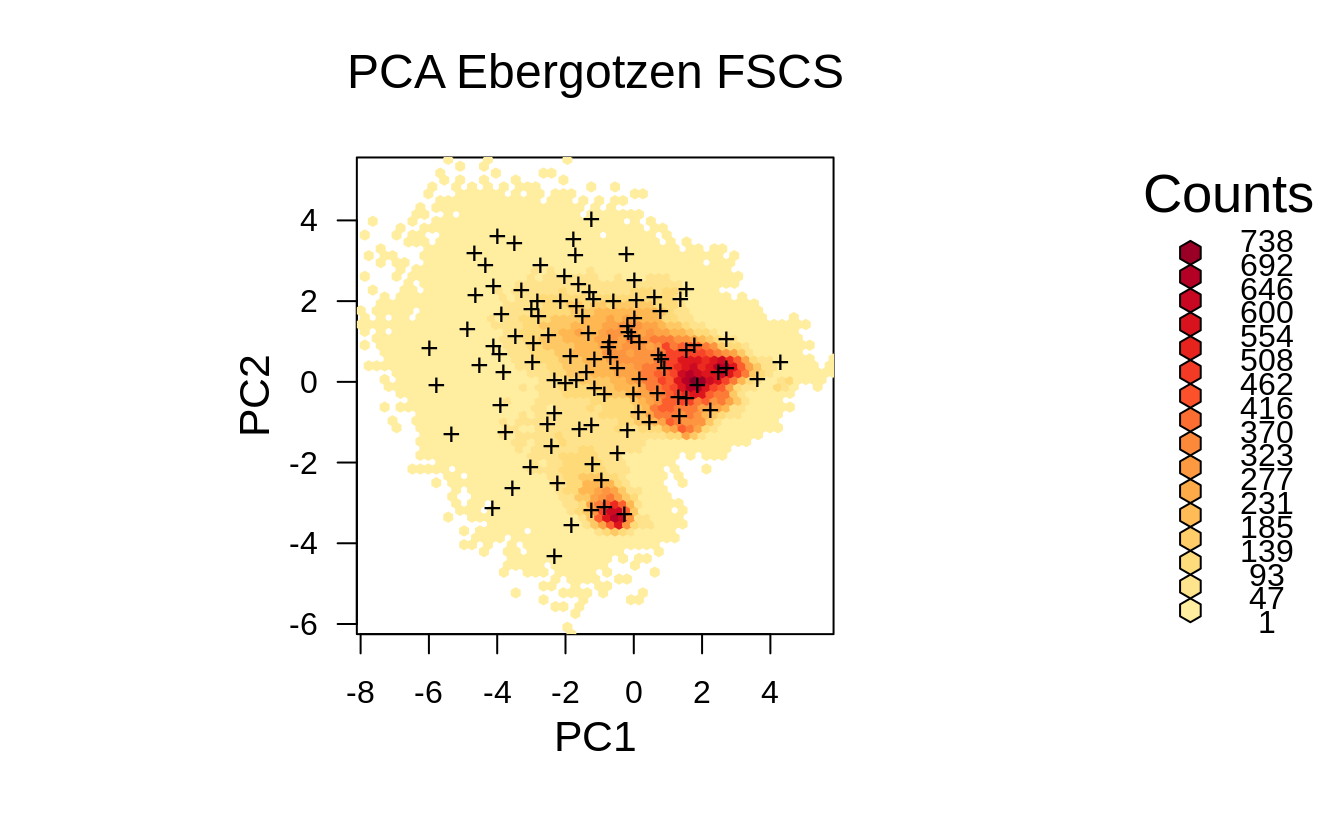
Figure 1.11: Distribution of the FSCS points from the previous example displayed in the feature space.
The FSCS sampling pattern in feature space looks almost as grid sampling in feature space. FSCS seems to put more effort on sampling at the edges on the feature space in comparison to LHS and SRS, and hence can be compared to classical response surface designs such as D-optimal designs (Hengl, Rossiter, & Stein, 2004).
h2o.shutdown(prompt = FALSE)1.8 Summary points
In the previous examples we have shown differences between SRS, LHS and FSCS. SRS and LHS are IID sampling methods and as long as the number of samples is large and the study area is complex, it is often difficult to notice or quantify any under- or over-sampling. Depending on which variant of FSCS we implement, FSCS can result in higher spatial spreading especially if a study area consists of a combination of a relatively homogeneous and complex terrain units.
The Ebergotzen dataset (existing point samples) clearly shows that the “convenience surveys” can show significant clustering and under-representation of feature space (Fig. 1.7). Consequently, these sampling bias could lead to:
-
Bias in estimating regression parameters i.e. over-fitting;
-
Extrapolation problems due to under-representation of feature space;
- Bias in estimating population parameters of the target variable;
The first step to deal with these problems is to detect them, second is to try to implement a strategy that prevents from model over-fitting. Some possible approaches to deal with such problems are addressed in the second part of the tutorial.
LHS and FSCS are recommended sampling methods if the purpose of sampling is to build regression or classification models using multitude of (terrain, climate, land cover etc) covariate layers. A generalization of LHS is the balanced sampling where users can select even variable inclusion probabilities (Dick J. Brus, 2015; Grafström, Saarela, & Ene, 2014).
Ma, Brus, Zhu, Zhang, & Scholten (2020) compared LHS to FSCS for mapping soil types and concluded that FSCS results in better mapping accuracy, most likely because FSCS spreads points better in feature space and hence in their case studies that seem to have helped with producing more accurate predictions. Yang et al. (2020) also report that LHS helps improve accuracy only for the large size of points.
The h2o.kmeans algorithm is suited for large datasets, but nevertheless to
generate ≫100 clusters using large number of raster layers could become RAM
consuming and is maybe not practical for operational sampling. An alternative
would be to reduce number of clusters and select multiple points per cluster.
In the case of doubt which method to use LHS or FSCS, we recommend the following simple rules of thumb:
- If your dataset contains relatively smaller-size rasters and the targeted number of sampling
points is relatively small (e.g. ≪1000), we recommend using the FSCS algorithm;
- If your project requires large number of sampling points (≫100), then you should probably consider using the LHS algorithm;
In general, as the number of sampling points starts growing, differences between SRS (no feature space) and LHS becomes minor, which can also be witnessed visually (basically it becomes difficult to tell the difference between the two). SRS could, however, by accident miss some important parts of the feature space, so in principle it is still important to use either LHS or FSCS algorithms to prepare sampling locations for ML where objective is to fit regression and/or classification models using ML algorithms.
To evaluate potential sampling clustering and pin-point under-represented areas one can run multiple diagnostics:
- In geographical space:
-
kernel density analysis using the spatstat package, then determine if some parts of the study area have systematically higher density;
- testing for Complete Spatial Randomness (Schabenberger & Gotway, 2005) using e.g. spatstat.core::mad.test and/or dbmss::Ktest;
-
kernel density analysis using the spatstat package, then determine if some parts of the study area have systematically higher density;
- In feature space:
- occurrence probability analysis using the maxlike package;
-
unsupervised clustering of the feature space using e.g.
h2o.kmeans, then determining if any of the clusters are significantly under-represented / under-sampled;
- estimating Area of Applicability based on similarities between training prediction and feature spaces (Meyer & Pebesma, 2021);
Plotting generated sampling points both on a map and feature space map helps detect possible extrapolation problems in a sampling design (Fig. 1.7). If you detect problems in feature space representation based on an existing point sampling set, you can try to reduce those problems by adding additional samples e.g. through covariate space infill sampling (D. J. Brus, 2021) or through 2nd round sampling and then re-analysis. These methods are discussed in further chapters.